人形机器人是“自动”与“自主”高度耦合的产物,其发展历程可以追溯到 20 世纪初期,经历了从初具人形的被动机构到大模型赋能、自主通用的全能机 器人的演变。
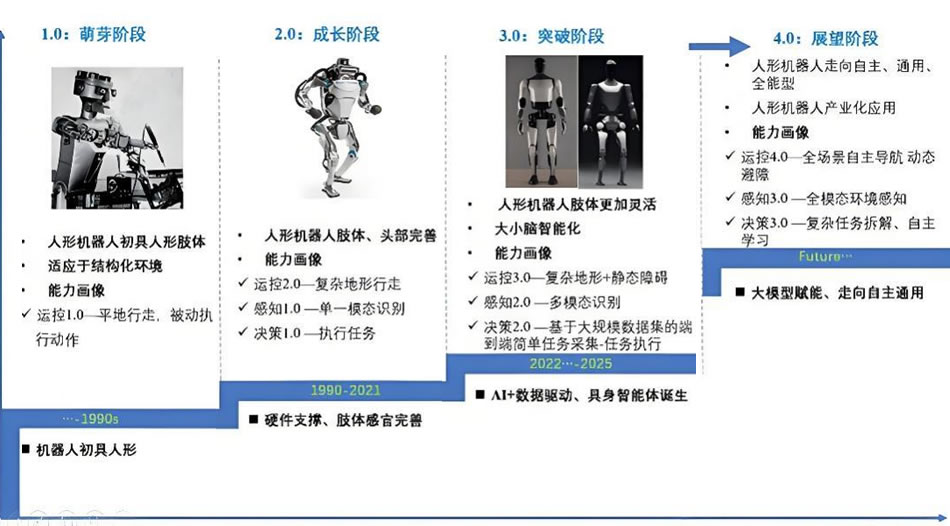
在人形机器人萌芽阶段,机器人理论和技术从理论开始走向实践,以日本早 稻田大学为代表,开发了一系列双足式机器人,能够基本实现双足行走功能和控 制能力,初步实现拟人化的结构,但整体运动能力较弱。这一阶段的人形机器人 主要在实验室环境中进行研究,只能适应简单结构化的环境,功能相对有限。
在人形机器人成长阶段,在运动控制革命和智能感知技术的加持下,人形机 器人智能化程度显著提升,能够完成更复杂的任务,人形机器人在视觉、力觉等 模态传感融合方面取得技术突破,通过融合感知数据,实现初步感知-决策闭环, 能够独立、稳定地执行复杂动作, 并进行简单判断与任务执行。人形机器人开始 应用到简单的生产生活当中,对人形机器人安全与可靠性的要求不断提高,开始 逐步对人形机器人零部件进行安全、可靠性等方面的测试评定。
在人形机器人突破阶段,随着 AI 大模型如大语言模型(Large Language Models,LLMs)、视觉语言模型(Visual Language Models,VLMs)、视觉语言 动作(Visual Language Actions ,VLAs)模型等技术快速迭代,以及多模态数据 集的驱动,赋予人形机器人“大脑”理解物理世界的能力,能够在非结构化环境 中进行语义理解,具备自主决策、执行、推理和执行能力。特别是大规模数据集 的引入,如动作模仿数据、三维环境感知数据、人机交互数据采集, 通过端到端 模型训练形成通用能力模型,使机器人具有泛化与迁移能力,逐渐提升人形机器 人在复杂动态环境下运动控制与任务执行能力,配合高自由度、高集成度的人形 机器人“肢体”,能够保持对复杂环境较高的适应性和反应能力。人形机器人开 始逐渐应用于制造业、服务业等标准化场景, 对人形机器人整机智能化和可靠性提出更高要求,检测维度也从零部件过渡到整机的智能化、可靠性、安全等多维 度的检测评定,以确保人形机器人在各类典型场景下的安全、可靠应用。
在未来,人形机器人将依托通用大模型赋能,向自主、通用、全能型方向进化,具备高度自主性与通用性。全模态感知系统将赋予人形机器人精准识别复杂环境的能力,实现动态避障与智能决策,同时将具备复杂任务拆解与自主学习能 力,支持多任务并行处理与持续优化,通用性、跨场景任务成为可能, 推动人形 机器人在工业制造、家庭服务、商业娱乐等领域实现复杂场景应用, 同时也伦理 与道德方面的冲击。未来人形机器人发展任重道远,拥有无限的潜力与可能。
当前,人形机器人正处于突破阶段。人形机器人将借助多 AI 大模型(语言、 视觉、动作等) ,通过模型计算、大规模数据训练实现任务执行, 逐步应用于家 庭、商业服务、工业生产等简单标准化场景任务。
|





