机器人被誉为“制造业皇冠顶端的明珠”,其研发、制造、应用是衡量一个 国家科技创新和高端制造业水平的重要标志,已成为全球新一轮科技和产业革命 的重要着力点。人形机器人作为新一代人工智能最佳载体,已经成为全球科技和 产业竞争的新高地。
从人形机器人零部件的构成维度来看,人形机器人涵盖了感知系统、决策系 统、执行系统以及电池等多个关键组成部分,其中感知系统主要包括视觉、听觉、 触觉等多维传感器,用于环境识别与交互;决策模块以处理器为核心,负责数据 处理与任务规划;执行模块是机器人的运动核心,包含直线关节模组、旋转关节 模组、灵巧手等部件。
其中关节模组是人形机器人的最重要硬件模块,不仅需要具备高功率密度、 高响应性、高能量利用效率,同时需要承受动态冲击,决定了机器人的运动能力、 灵活度和成本控制;一体化关节模组将电机、减速器、编码器、传感器等关键部 件整合于一体,为机器人提供了强大的动力支持和精确的运动控制,一体化设计 不仅提高了机器人的整体性能和稳定性,同时降低了机器人的重量和成本,是机器人产业化的关键部分。
从人形机器人技术架构维度分析,当前阶段的具身智能人形机器人可分为 “大脑”、“小脑”和“肢肌体”三部分。
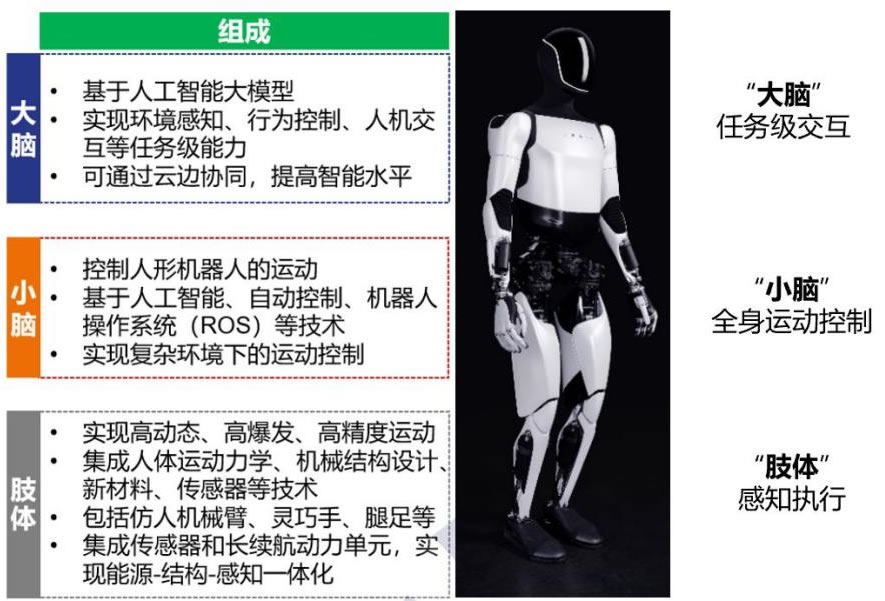
人形机器人“大脑”基于人工智能大模型技术,通过多模态模型、强化学习 和多模态数据集训练,管理和协调机器人完成各种任务功能。“大脑”是机器人 决策的核心,也是具身智能时代机器人区别于程序控制机器人(传统工业机器人、 服务机器人等)的关键环节。
人形机器人“小脑”负责实现机器人轨迹规划和运动控制(肢体驱动、姿态 平衡等),主要由控制器、伺服驱动器、电机、传感器等构成。
人形机器人“肢体”包含仿人机械臂、灵巧手、腿足等,集成人体运动学、 动力学、机械结构设计、新材料、传感器等技术, 实现高动态、高爆发、高精度的运动。
|





