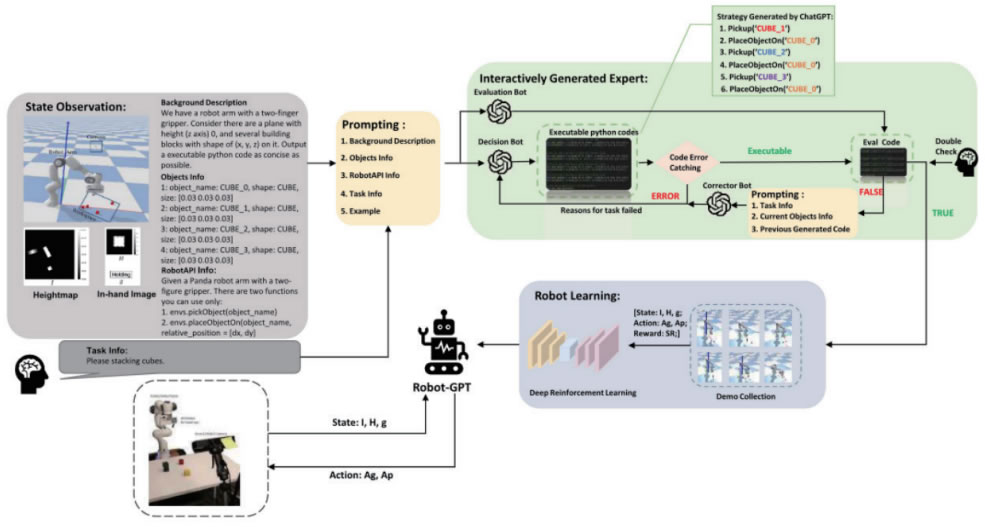
子研究院与工程院外籍院士张建伟教授、孙富春教授和方斌教授合作,提出了RobotGPT,一个创新的机器人操作决
策框架,旨在推动ChatGPT在机器人操控应用中的实际应用。该框架的核心思想是将环境线索转换为自然语言,使得ChatGPT能够
为智能体Q(Agent)生成动作代码,从而赋予机器人使用自然语言进行理性互动的能力,执行如拾取、放置等任务。
然而,ChatGPT生成的执行代码在稳定性和安全性方面存在一定的挑战。由于ChatGPT可能会对同一任务提供不同的答案,导致结
果的不确定性,这种不稳定性使得直接将ChatGPT集成到机器人操作循环中成为一项困难。尽管将温度参数设定为0可以使输出更
加一致,但这也可能牺牲多样性和创造力。
为了克服这些问题,RobotGPT引入了一种有效的提示结构,并结合强大的学习模型,以确保系统的可靠性和稳定性。框架中还加入了用于衡量任务难度的指标,以便更好地评估ChatGPT在机器人操作中的表现。通过在模拟和真实环境中的测试,RobotGPT显著提G了任务成功率,从38.5%提升至91.5%。这一结果表明,相比于直接使用ChatGPT作为任务规划者,利用ChatGPT训练RobotGPT
能提供更加稳定和G效的解决方案。
尽管存在一定的限制和安全风险,RobotGPT框架为ChatGPT在机器人任务中的应用开辟了新的前景,并为相关研究提供了重要的启
示,探索了ChatGPT在机器人操控中的潜力与能力边界。
|





