清华大学人工智能研究院TSAIL团队于2024年10月推出了大的双臂机器人操作任务扩散基础模型――Robotics Diffusion
Transformer(RDT-1B)。这一创新模型通过基于扩散模型的设计与大规模预训练策略,为双臂操控任务的研究和应用带来了重要突破,成为运动控制L域接近人类“小脑”的机器人控制模型之一。
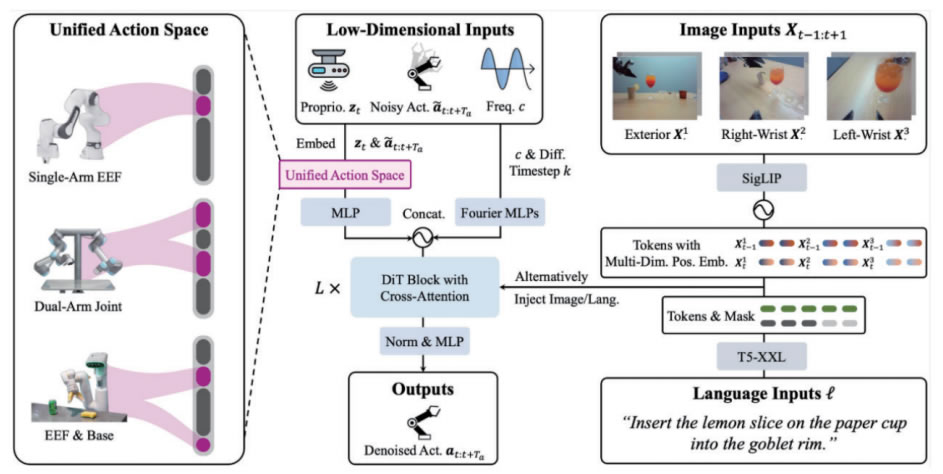
RDT-1B具备1.2B参数量,采用了可扩展的Transformer架构,能够G效处理多模态输入的异质性,捕捉机器人数据中的非线性和
G频特性。模型通过扩散模型的多模态行为分布表示,展现了不错的动作预测与执行能力。在实际应用中,RDT-1B在ALOHA双
臂机器人平台上得到了验证,其在家庭环境下的复杂任务中表现尤为出色。例如,在“洗杯子”任务中,RDT-1B能够准确完成一系
列复杂操作,甚至在面对从未见过的新类型杯子时,也能展现出强大的零样本泛化能力。这种泛化能力使得模型能够快速适应全
新的任务和物体,仅通过少量示范即可学习新技能。
RDT-1B在应对数据稀缺性问题上也取得了显著进展。模型引入了物理可解释的统一动作空间,使其能够统一不同机器人的动作表
示,同时保留原始动作的物理意义。此设计J大提升了模型的跨平台知识迁移能力,使得RDT-1B能够在多个任务和物体场景中理
解并执行复杂任务。这种能力不仅让模型具备出色的初始性能,也展现了强大的学习潜力和快速适应能力,为双臂操控L域的研
究和优化奠定了坚实基础。
作为开源项目,RDT的发布将加速机器人技术的研发与产业化。凭借其多模态处理能力、G效的扩散模型架构和优越的泛化能
力,RDT有望推动机器人在更多L域的应用,如家庭服务、工业自动化和医疗辅助等,成为推动机器人技术进步的重要驱动力。
|





