具身智能是指像人一样能与环境交互感知,自主规划、决策、行动、执行能力的机器人或仿真人,又可称之为“具身智能机器人”。
它的实现包含了人工智能L域内诸多的技术,例如计算机视觉、自然语言处理、机器人学等。
总的来说,具身智能机器人先要能够听懂人类语言;其次分解任务,规划子任务,移动中识别物体,与环境交互,终完成相应任务。
具身智能有望打开 AI 新空间,引L人工智能下一站浪潮。
实现具身智能需要多个学科的交叉能力。当前具身智能产业链中包括数字基础设施、机器人制造、机器视觉、多模态大模型的厂商等相关环节投资机会值得重点关注。
机器人制造:为具身智能提供了机械的身体和基本的运动控制。
深度学习:该学科中的神经网络仍然是具身智能中主要的工具。为具身智能提供推理能力;强化学习,从环境反馈中,帮助具身智能调优模型。
多模态:计算机视觉,为具身智能提供处理视觉信号能力;语音与自然语言处理,为具身智能提供理解与对话能力,实现与人类交互。
计算机图形学:其开发的物理仿真环境给具身智能提供了真实物理世界的替代,大大加快了学习的速度并降低了成本。
认识科学:帮助具身智能理解人类,构建认识与价值。
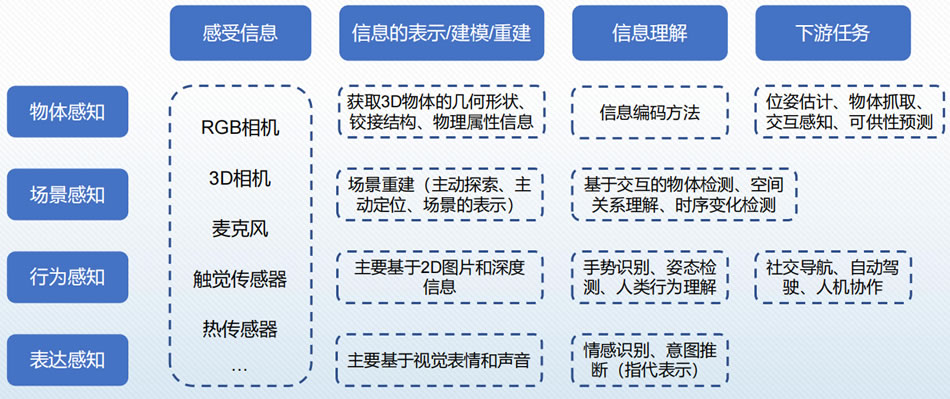
人形机器人感知模块是人形机器人实现具身智能的基础,主要包括视觉、位觉、触觉和力觉等传感器,其功能如下:
视觉感知:通过摄像头、RGBD相机、激光雷达等设备获取环境信息,用于定位、避障和物体识别。
位觉感知:通过IMU等设备获取机器人的姿态信息,如角速度、加速度等,用于机器人姿态控制和位置定位。
触觉感知:通过触觉传感器获取接触力信息,用于灵巧手抓取和碰撞检测等。
力觉感知:通过力矩传感器获取关节执行器承受的力矩信息,用于实现柔顺控制。
感知模块中的各种传感器遍布机器人全身,并通过软硬件算法实现数据融合,为交互模块和运控模块提供实时准确的信息反馈,从而实现智能感知、决策和控制。在人形机器人中,感知模块的优化对于提G机器人的智能水平具有重要意义
|





